Damage detection
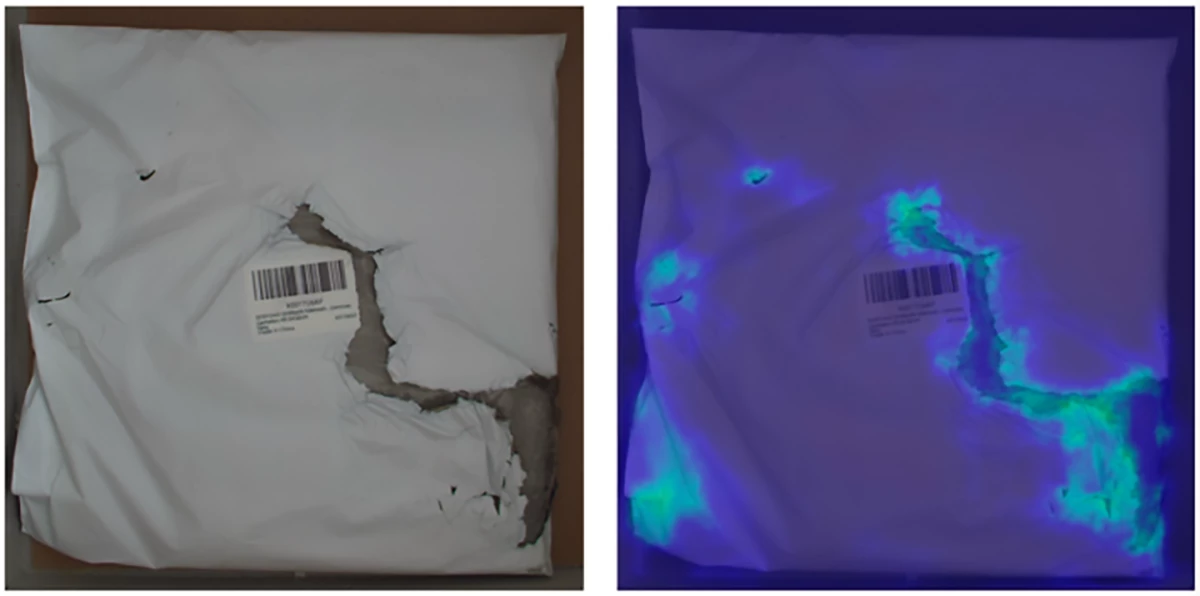
My work on automating damage detection in Amazon's warehouses got featured by an amazon.science article: The surprisingly subtle challenge of automating damage detection at Amazon
Lachine Mearning. Borotics. Irtificial Antelligence.

I am a Senior Applied Scientist at Amazon Robotics AI. Before that, I received my PhD from the Robotics & Biology Lab, TU Berlin. My research activities focus on robotics and machine learning. In some of my spare time, I make music.
19/09/2022: My work on automating damage detection in Amazon's warehouses got featured in an amazon.science article: The surprisingly subtle challenge of automating damage detection at Amazon. Super proud of the work of our team!
02/04/2021: Our short paper on Sim2Real in Robotics and Automation got accepted at the IEEE Transactions on Automation Science and Engineering. Thanks to all the workshop participants for making the workshop such a success and interesting enough to write about it!
My work on automating damage detection in Amazon's warehouses got featured by an amazon.science article: The surprisingly subtle challenge of automating damage detection at Amazon
I am the lead organizer of the sim2real for robotics workshop, that has been colocated with R:SS 2019 and R:SS 2020. Together with the debaters, we have written a summary paper (extended version) about the 2020 edition of the workshop.

In May 2015, our Team RBO won a prestigious international robotics challenge.
The lessons learned paper won the Best Systems Paper award at RSS 2016; the paper on the perception system got nominated for Best Paper Award at IROS 2016 (see here for extended journal version).
Research paper on learning state representations in multi-task reinforcement learning.
The paper has been presented at the NIPS Workshop on Deep Learning for Action and Interaction. The spotlight talk is online on youtube.
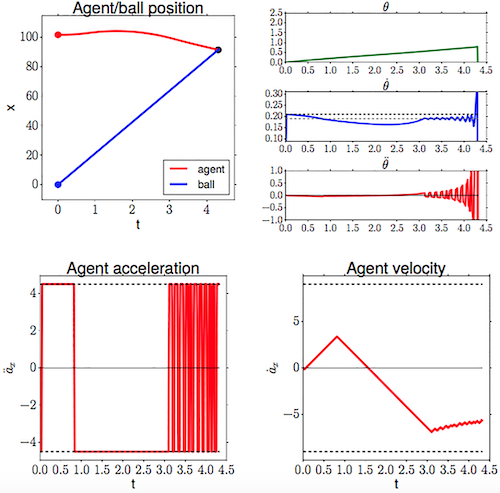
Our paper No free lunch in ball catching: A comparison of Cartesian and angular representations for control sheds some new light on 50 years of scientific debate about the gaze heuristic. Starring: (non-)optimal heuristics and (non-)optimal optimal control.
In my thesis, I studied two problems in robot learning, ball catching and learning manipulate articulated object, and I developed a conceptual framework for understanding solutions to these problems: the spectrum of decomposability.
Email me at mail - at - firstnamelastname - dot - de.
Disclaimer: All opinions and work presented here are my own and do not reflect the opinion of my employer.